Search Results:
大疆的激光雷达Livux的工作原理
posted on 07 Sep 2021 under category 工程技术
传统的激光雷达,需要几十个激光头,并且像雷达一样不停转,才能得到比较清晰的“图像”。缺点是
- 几十个激光头,成本太高、体积大;
- 即使只转动一个反射镜,因为有几十个激光头,机械转动装置体积也小不了,可靠性堪忧。
根据上海禾赛的招股书,2020年卖出2000-3000套,每套8万左右。禾赛最新的低成本产品大概在3-4万元一个。
大疆激光雷达Livox通过一个非常巧妙地设计,用 少得多的激光头,1/10的成本(4000-5000一个),实现接近传统激光雷达的效果。
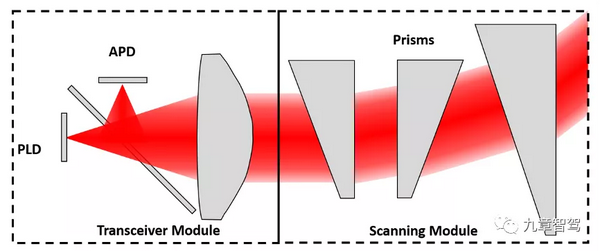
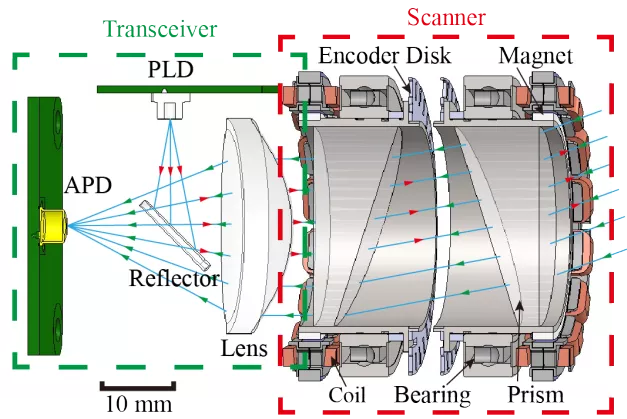
Livox采用了独特的棱镜扫描方式,使用两个棱镜,让光线从不同的方向发射,当光线穿过一个棱镜时,会发生折射,从而光线方向会发生变化。其中的”Vector”表示棱镜使光线发生偏折方向,第一个棱镜使光线偏折“Vector1”,第二个棱镜使光线偏折“Vector2”,最终合成的向量则是光线最终发射的方向。而这里的棱镜是固定在电机上面的,随着电机转速的不同,会扫描出各种各样的图案。
扫描出来的“图像”呈菊花型,初期密度低,随着棱镜不断转动,逐渐实现全覆盖。 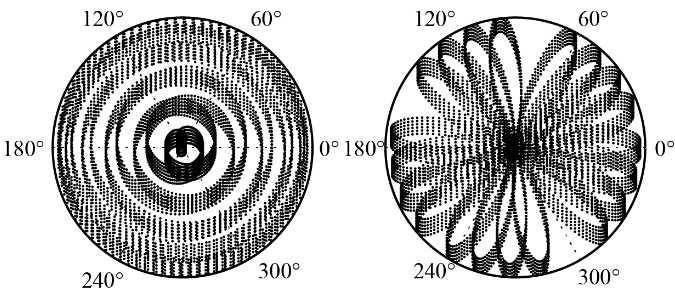
不过,这种技术的缺点是
- 不能360度扫描,只能扫描一个较小的角度,一辆车需要配置多个Livox激光雷达。
- 棱镜虽然体积小,但机械转动速度需要更快,所以也有机械损耗和维护问题。